

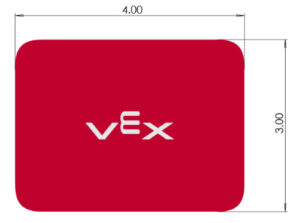
- Main objects: Bean Bags (3″ × 4″) in 3 colours, red, blue and yellow
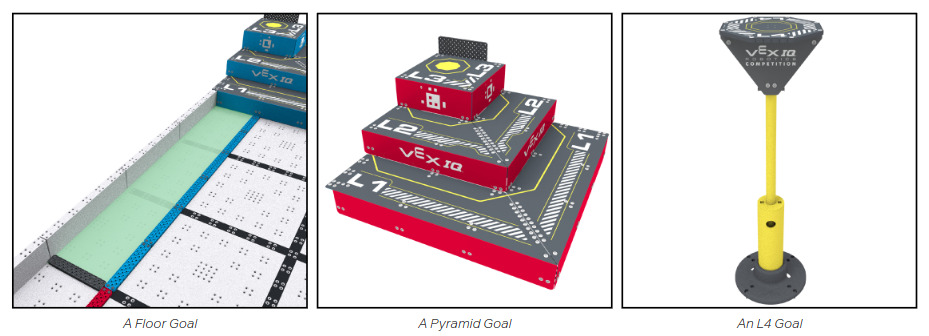
- Goal: Multiple goal areas including floor goals and multi-level goals (L1 → L4)
- Higher levels = exponentially higher points (up to L4)
- Constraint: Robot can carry only one object at a time
- Field includes long paths vs narrow shortcuts, forcing design trade-offs
- Robot initial configuration should fit the dimensions 11” wide x 20” long x 15” high
- Horizontal expansion up to a length of 24” is permitted during run from the initial dimension of 20” long
- Vertical expansion is unlimited beyond the initial dimension of 15”
1. Vertical Scoring Systems
- Multi-height goals (L1–L4) with different reachability levels mandate robots with the following mechanisms:
- Lifts / elevators
- Arm mechanisms
- Launchers (for high goals)
Slapshot required the robots to pick disks from dispensers more than 10.5 inches high. Mix and Match high goals required robots to place beam + pins or pins at a height of ~9.5 to 14 inches. Rapid Relay required scoring into the high goal which was higher than 15”.
Pitching In required launching balls into high goal hurling them over hanging bars at a height of 15.5”. The high goal in Pitching In was surrounded, on all sides, by hanging bars, limiting access to the high goal for the robot and requiring precise launching. Next Level involved picking hubs from Bonus Peg, on top of hanging structure at a height of 16”. Bank Shot involved scoring goals into scoring zones and placing them in high goals behind a 12” high fence. All these games involved using Lifting mechanisms and / or Launchers with precise launching essential for Bank Shot as well as Rapid Relay.

L4 goal in “Level Up” is at a height of 24” the highest ever I encountered till now in VIQRC. Precise Launchers seem an appropriate mechanism for L4 goals vis a vis Lifts/Elevators + Arms for Floor, L1-L3 goals.
2. Precision Placement / Targeting
Bean bags are soft and harder to control and require
- Controlled intake + release
- Stabilization mechanisms


Bean bags in Level Up are very different from the game elements in Slapshot(disks), Next Level{hubs} and Bank Shot(Balls). Even though the bean bags have a similar texture as Plush balls from Rapid Relay or padded balls from Pitching In, the distinct shape demands different mechanisms from Rapid Relay/Pitching In for manipulating the bean bag.
3.Path Optimization & Navigation
- Robots must decide:
- Long safe routes vs narrow shortcuts
- Leads to:
- Compact designs
- Agile drivetrains
Passing through narrow shortcut ie under the 8” fence potentially requires the robot to be compact within a height of 8” while passing under the fence. Alternatively, the robots can pass the bean bags from one side of the field to other similar to passes in Rapid Relay, thereby avoiding moving from one side of the field to other continuously.
4. Limited Throughput Design
One bean bag at a time rule:
- Removes “bulk scoring” strategies
- Emphasizes cycle efficiency
In Rapid Relay, robots were passing balls across the field. Robots can pass ball from one end of the field to other end thereby reducing transit time for both to place the bean bags in respective color goals.
5. Advanced Autonomous Potential
High goals + alignment = strong case for:
- Sensors
- Autonomous routines
Skills challenge likely becomes more competitive.